Translate This Page
Page 3
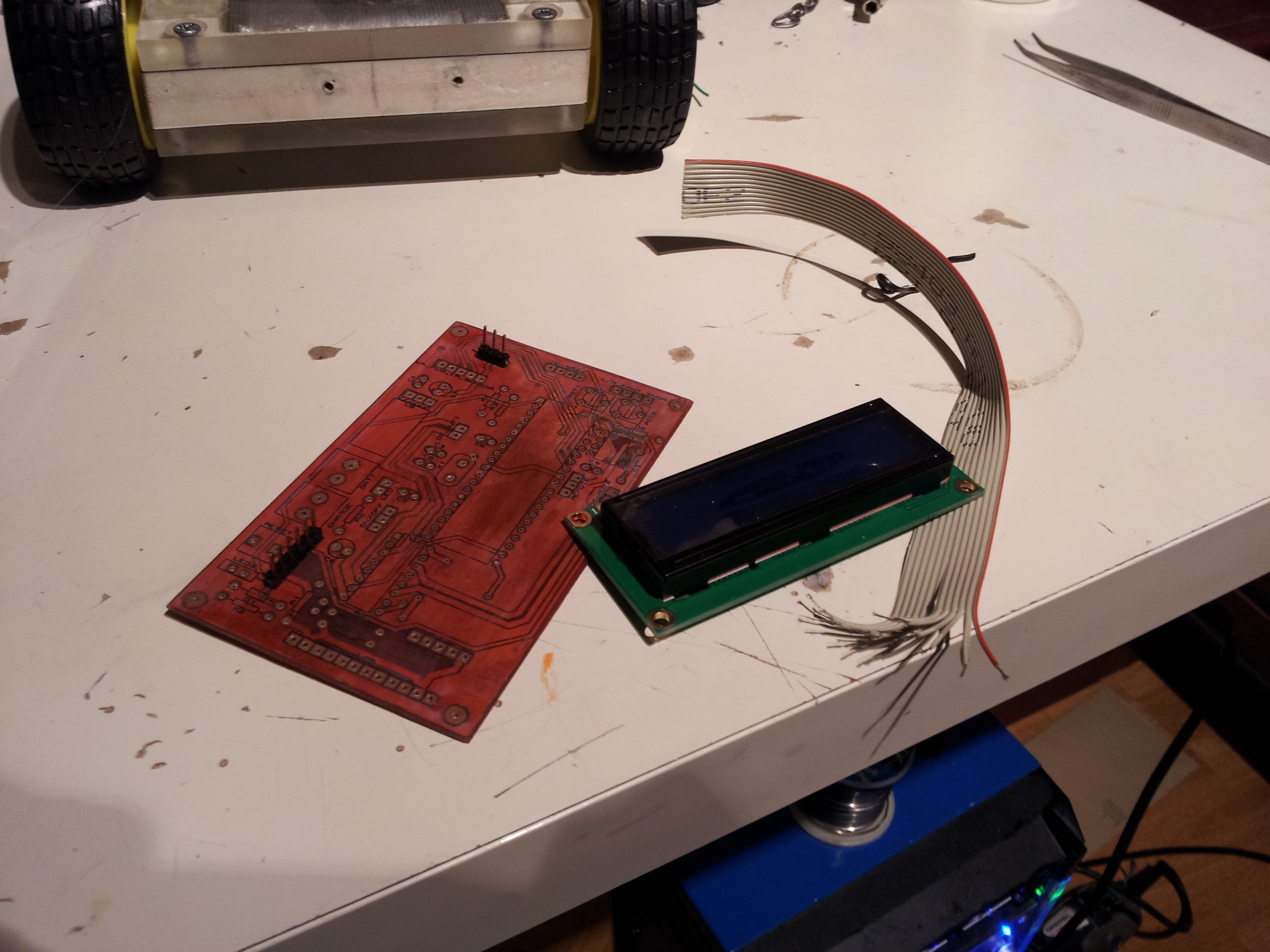
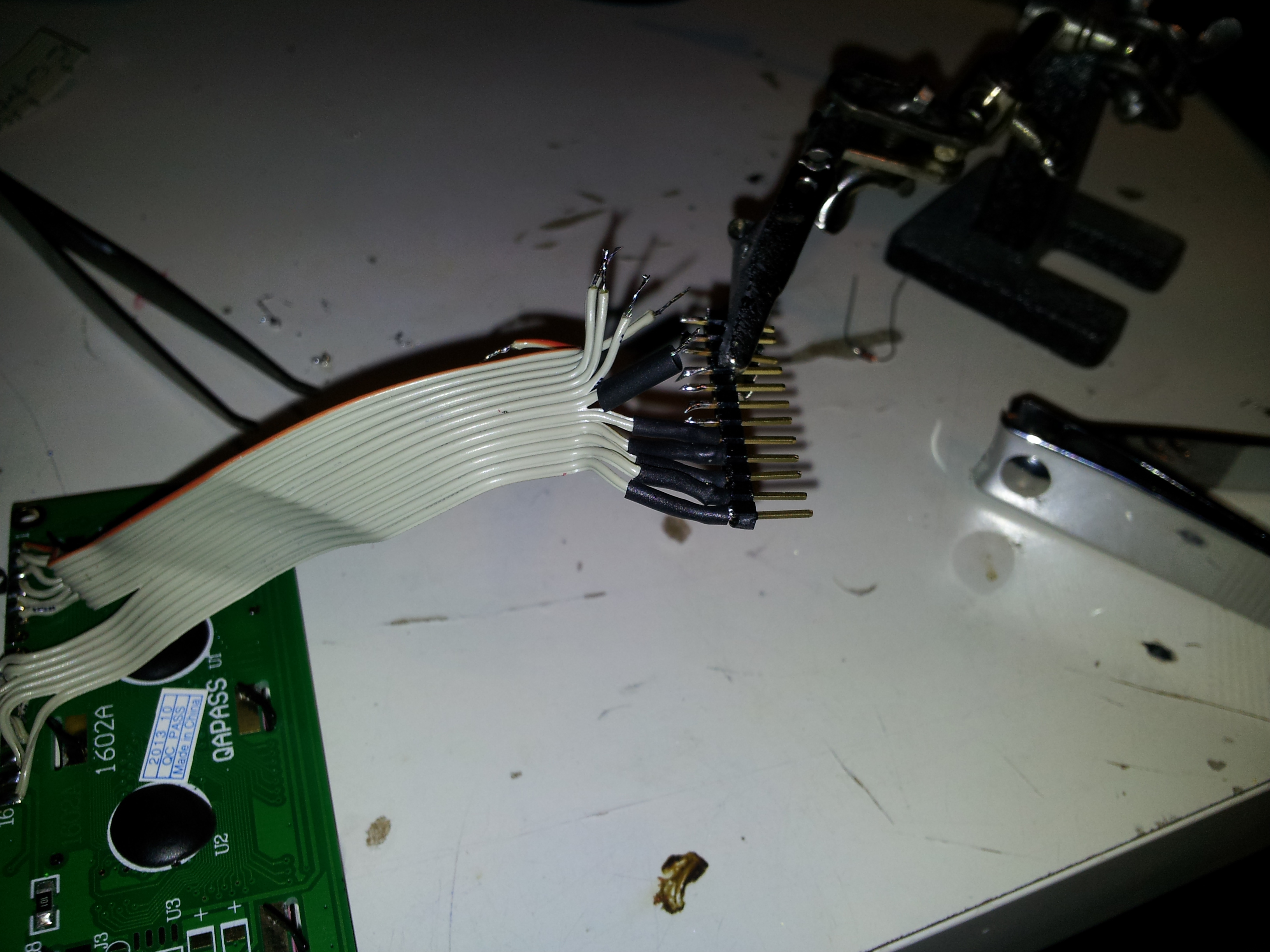
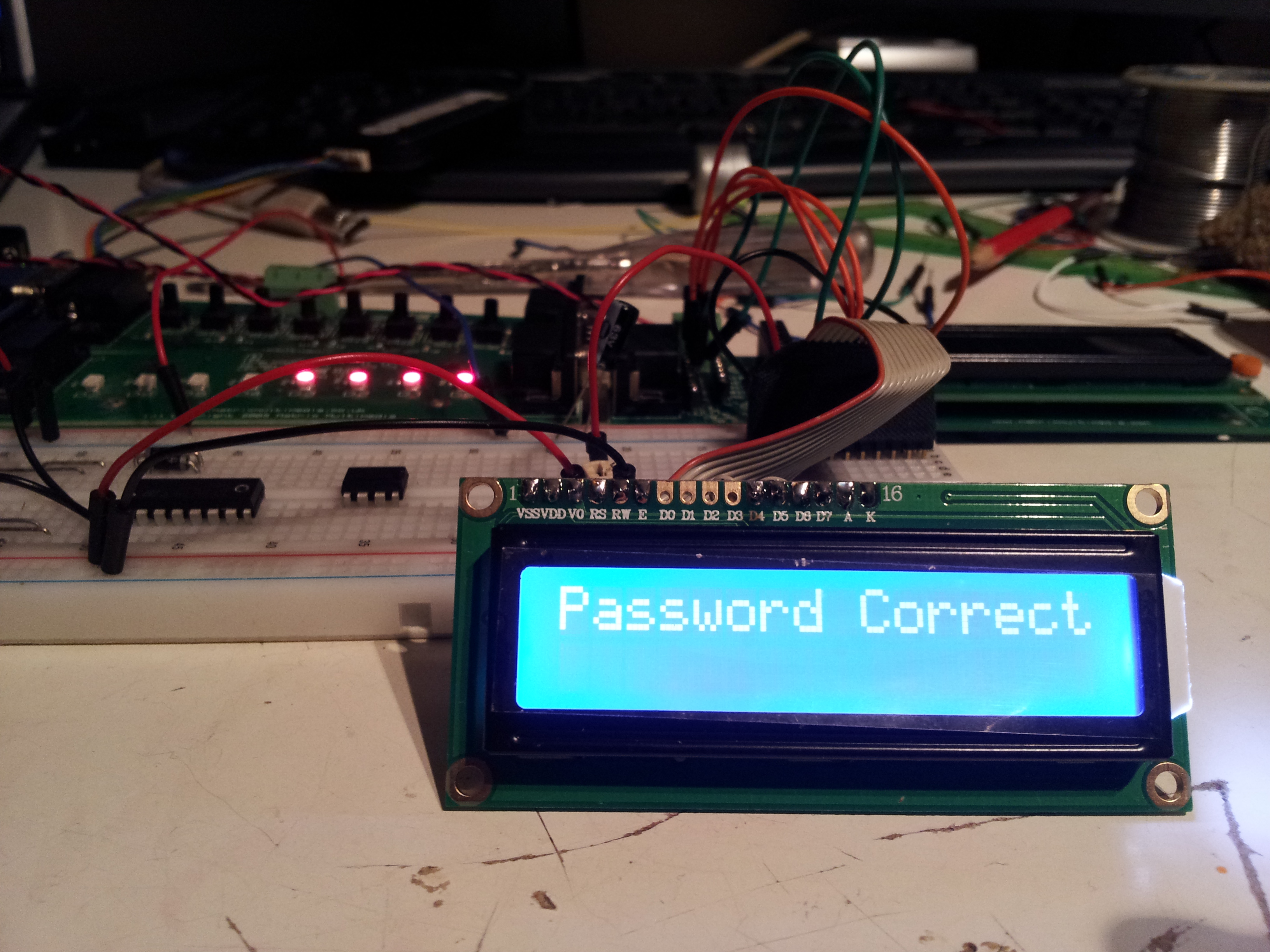
LCD
The LCD works in 4-bit mode, so it uses four data pins plus 2 extra pins for RS and Enable.
(RW pin is wired to ground)
The LCD is used to display a simple menu where you can check things like:
-
Select the mode: Line following or Exploring mode.
-
Battery Voltage
-
Servo test
-
The front side IR sensor
-
Display the distance from Ultrasonic sensor in cm.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}